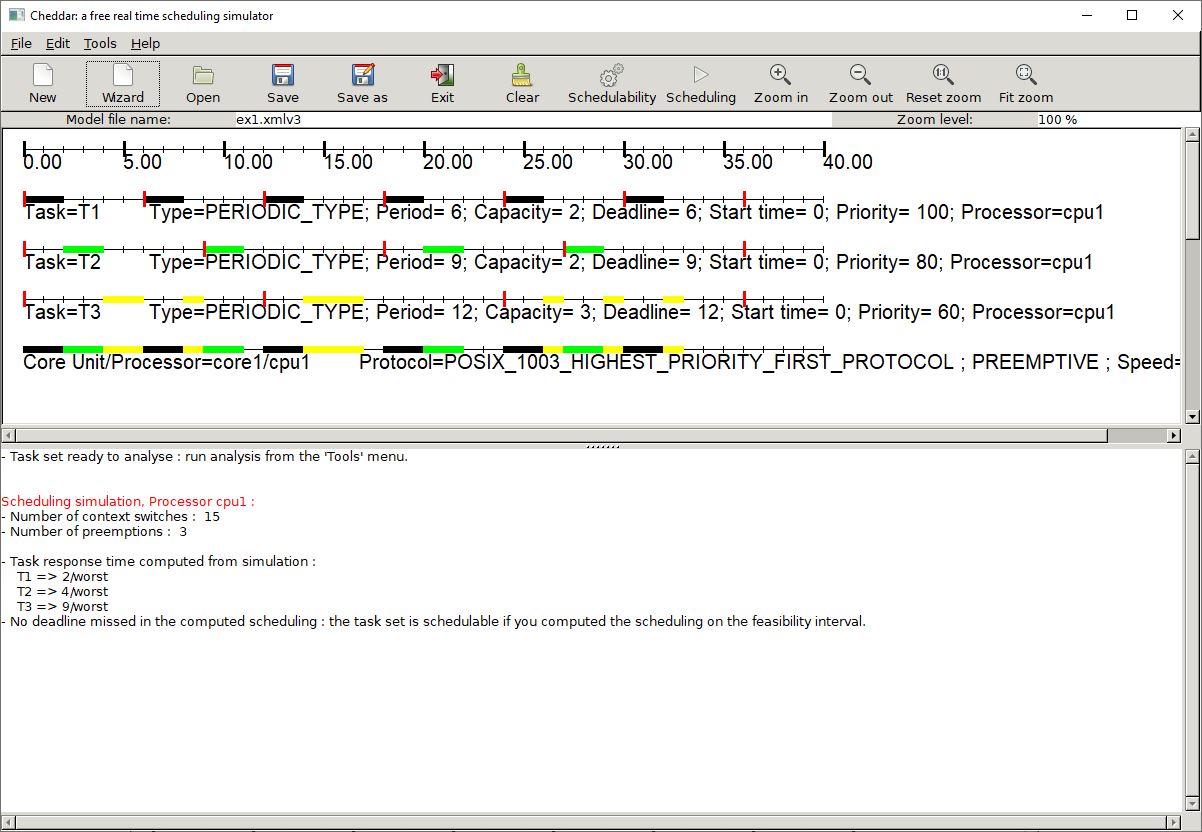
From the scheduling simulation, read the different response times for each task
(remind that response time = completion time - release time).
For a given task, can you see the response time varying during the scheduling simulation ? Why ?
When should we see the shortest response time ? Why ?
Finally, verify that all deadline are meet.
To do this exercise, download and save the file ex2.xmlv3
We investigate a system embedded in a car which displays various data to the driver.
This system is composed of several tasks and we want to verify their deadlines.
The system is composed of 5 tasks:
- Task SENSOR_1 reads every 10 s the speed of the car.
- Task SENSOR_2 reads every 10 s the temperature inside the car.
- Task SENSOR_3 reads every 40 s the GPS position of the car.
- Task DISPLAY_1 produces on a screen every 12 s a summary of the information retrieved
by the three sensor tasks.
- Finally, tasks DISPLAY_2 displays the map of the current location
of the car on another screen.
This display is made on request by the driver every 6 s on the worst case.
An enginer implements all those tasks and run them alone on a RTOS (Real-Time Operating System).
After several measurements, he shows that:
- Task SENSOR_2 and DISPLAY_1 execution times never exceed 2 s.
- Task SENSOR_3 needs between 2 and 4 s to successfully run its code.
- Tasks DISPLAY_2 has an execution time of less than 1 s.
- Tasks SENSOR_1 has most of the time an execution time of 1 s and sometime of 3 s.
We assume that all tasks start their first activation at the same time.
Furthermore, all tasks must complete their current activation before they have
to start the next one.
We assume an execution platform composed of one processor which provides a preemptive fixed priority scheduler.
Priorities range from 0 to 31. 0 is the lowest priority value.
Question 1:
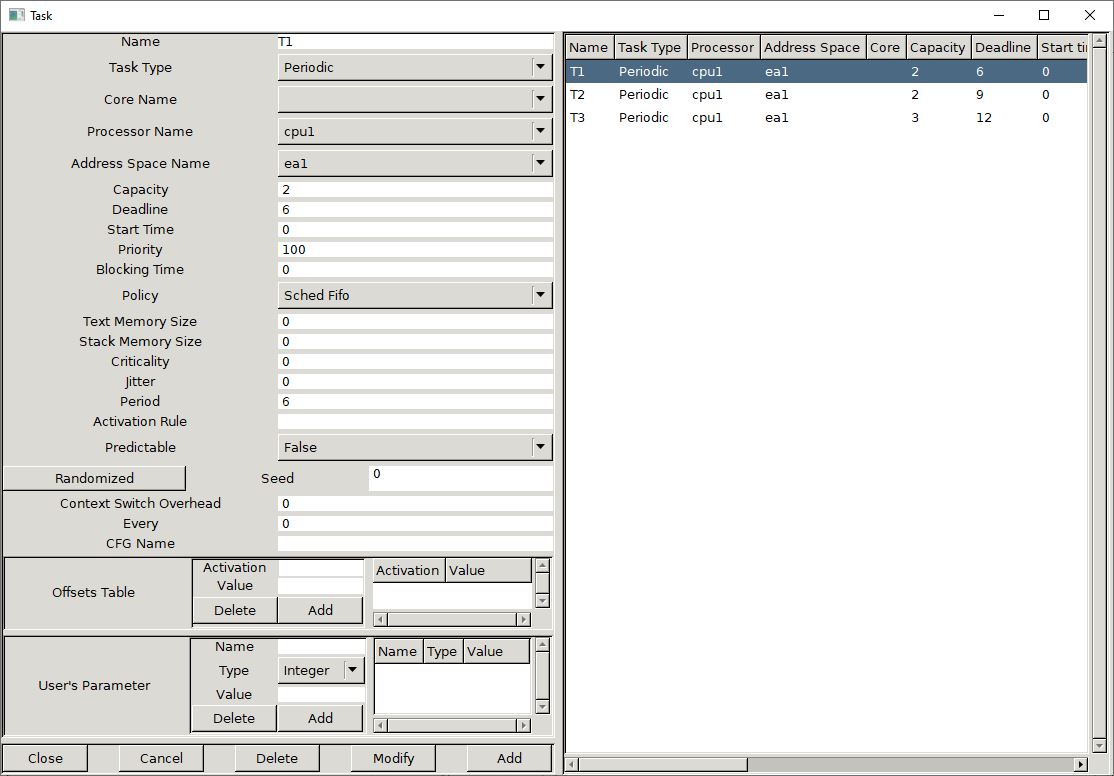
- Update file
ex2.xmlv3 by adding the tasks presented above.
- Assign a priority level for each task. Motivate your choices.
When tasks have the same period, you must assign them
a different level of priority.
Question 2:
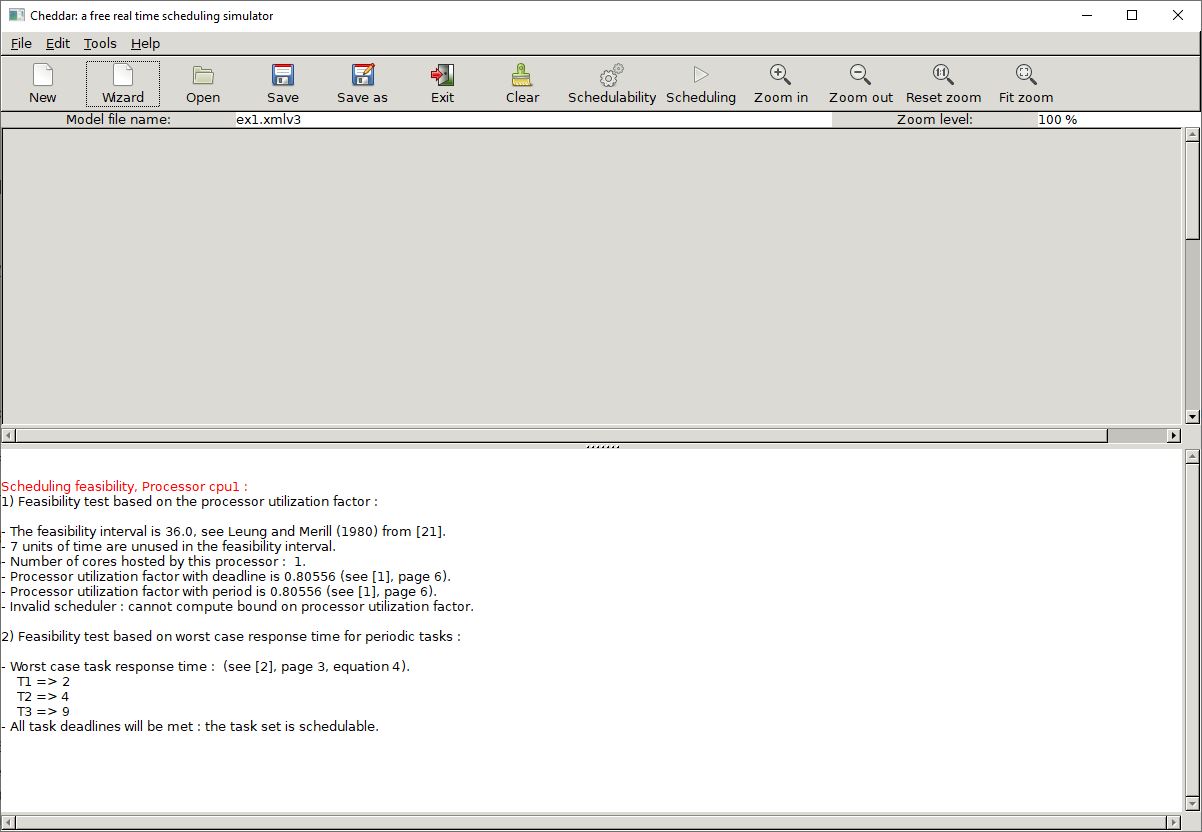
With Cheddar, compute the
worst case response time for the
SENSOR_1, the SENSOR_2, and the SENSOR_3 task. Do they meet their deadline?
We now work on Linux.
Prior to compile any RTEMS program, we must put the RTEMS C cross-compiler in your $PATH
shell variable. To do so, launch the following command in your working shell window:
source rtems.bash
In this exercise, we experiment the C cross-compiler for RTEMS.
On Linux, we will generate programs that are able to run on SPARC/Leon processor architectures.
Download and save
the following file and put it in a directory called EX3.
- Compile this first example of C program with the following command:
make clean
make
assuming you are in the EX3 directory.
- If everything is OK, you should find a file named o-optimize/sched.exe.
- Launch the command file o-optimize/sched.exe : what is the meaning of the displayed information?
- Can we directly launch the binary o-optimize/sched.exe from your Unix Shell?
- Now, we will use a Leon processor simulator to run this program.
This simulator is gracefully provided by
the Gaisler Research company
(See http://www.gaisler.com).
To launch this simulator, call the
following command from your Unix Shell:
$tsim
tsim>
- Now, load the binary into the memory of the simulator
with the load command:
tsim>load o-optimize/sched.exe
- Then, finally, run the program with the run command :
tsim> run
resuming at 0x40000000
Max priority for SCHED_FIFO = 254
Min priority for SCHED_FIFO = 1
...
- Answer to these questions:
-
What is the name of the C function which is the entry point of the program?
-
Can you say what does this program do?
Question 1:
In this exercise, we experiment the fixed priority scheduling with RTEMS.
Download and save
the following file and put it in a directory called EX4q1.
-
This program creates two threads:
task_A and task_B.
We want to assign priority 1 to task_A and priority 2 to task_B
- To set priority to tasks, look for stars in the init.c file
and replace them by a priority integer value.
- Compile your program. You should get an executable called two.exe.
-
Test and explain the generated scheduling.
- The program calls the function nanosleep to block the threads during one
second. Remove the calls to nanosleep, compile and run again the program.
Explain the new generated scheduling.
Question 2: